[ Terug ]
Dit zou het moeten worden:
Dit is de planning, in ongeveer chronologische volgorde.
- Spiegel: 15 of 20cm, zelf te slijpen. Omdat ik nog absoluut geen
slijpervaring heb, spelen we maar op veilig en kiezen een 15cm.
- Optiek: f/8 Newton-kijker:
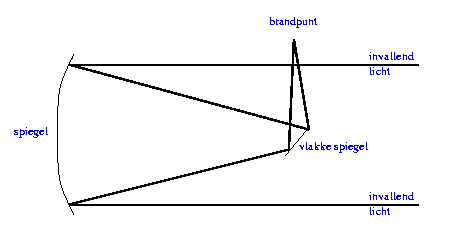 het licht van de hoofdspiegel wordt door een (vlak) klein spiegeltje
afgebogen naar het oculair. Nadeel is dat het kleine spiegeltje
in de weg hangt van het licht dat op de hoofdspiegel invalt.
Gelukkig dat spiegeltje niet al te groot en valt het lichtverlies al bij al mee.
het licht van de hoofdspiegel wordt door een (vlak) klein spiegeltje
afgebogen naar het oculair. Nadeel is dat het kleine spiegeltje
in de weg hangt van het licht dat op de hoofdspiegel invalt.
Gelukkig dat spiegeltje niet al te groot en valt het lichtverlies al bij al mee.
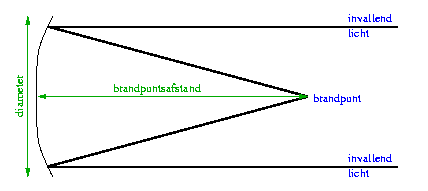
De f/8 geeft aan dat de brandpuntsafstand 8 keer zo groot is
als de diameter van de spiegel, in mijn geval dus 8x15cm = 120cm.
 Spiegels met kleine f-getallen (f/5 bijvoorbeeld) worden
snelle spiegels genoemd;
spiegels met grote f-getallen (f/10) worden dienovereenkomstig
traaggenoemd. De benamingen hebben iets te maken met de
belichtingstijden die nodig zijn als je aan astrofotografie gaat doen.
(Zie ook de ATM FAQ.)
Spiegels met kleine f-getallen (f/5 bijvoorbeeld) worden
snelle spiegels genoemd;
spiegels met grote f-getallen (f/10) worden dienovereenkomstig
traaggenoemd. De benamingen hebben iets te maken met de
belichtingstijden die nodig zijn als je aan astrofotografie gaat doen.
(Zie ook de ATM FAQ.)
- Opstelling: altazimut. Dit komt erop neer dat de telescoop om
twee assen kan draaien: links-rechts (azimut) en boven-onder (altitude of hoogte).
De reden hiervoor is dat ik een mechanisch zo eenvoudig mogelijke constructie
wil. Zo'n LRBO opstelling heeft als nadeel dat je moeilijker kan volgen
met een volgmotor. De sterren beschrijven immers schijnbaar cirkelbogen
aan de hemel, zodat je van links naar rechts én van boven naar
onder moet bijsturen, in tegenstelling
tot andere opstellingen, waarbij maar één as moet
draaien, maar waar de constructie wat moeilijker is.
Dat is geen bezwaar want ik wil er toch een computersturing in.
Dit onder het motto hou de hardware simpel en steek de complexiteit
in de software. Het is immers veel eenvoudiger, goedkoper en betrouwbaarder
complexe software te maken dan complexe hardware.
Naar het schijnt is een nauwkeurigheid van 4 boogseconden nodig voor
astrofotografie.
- Computersturing: bedoeling is mijn oude laptop op te lappen
(zijn arme harddisk is helaas ter ziele gegaan) en via de parallelle
poort twee stepper-motoren aan te sturen (een links-rechts en een boven-onder).
Eventueel kan er later nog een derde motor komen die de camera om haar
as doet draaien (om de zgn. field rotation te compenseren), maar
in eerste instantie komt er geen camera achter, dus dat kan wachten;
bovendien is het plan een CCD-camera aan te brengen, en dan kunnen
we het draaien van het camerabeeld volledig in software doen (zie het
motto hierboven).
Tegenwoordig kan je op het internet
sterkatalogen bij de vleet vinden,
en het zou natuurlijk erg plezant zijn om zo'n kataloog in de laptop
te stoppen en dat te koppelen aan de telescoopsturing. Met andere
woorden, op de laptop krijg je de sterrenkaart te zien, waarop je
rondloopt en de telescoop draait vanzelf naar het stuk hemel dat je
aanduidt.
- CCD-camera: om mooie plaatjes te schieten natuurlijk :-)
In combinatie met de computersturing kan het volgen preciezer gebeuren,
doordat we kunnen zien of de motortjes wel ver genoeg gedraaid hebben
door gewoon te kijken naar de beelden die de camera doorstuurt.
Een CCD-camera heeft als voordelen boven een klassieke camera
dat er meer licht wordt opgevangen en dat je een aantal dingen
in software kan doen. Een idee is eens te kijken wat je zoal kan
doen door in plaats van één keer lang (zeg een kwartier
of zo) te belichten en dan het beeld van de CCD uit te lezen,
een pak kortbelichte beeldjes (1 seconde of nog minder) te nemen
en die zelf bij elkaar op te tellen. Wat kunnen we hiermee winnen?
We kunnen elk apart beeld corrigeren; een simpele correctie
is ervoor te zorgen dat de sterren niet `bewegen' (doordat het volgen
niet precies genoeg gebeurde, doordat iemand tegen de telescoop heeft
gestampt, weet ik veel) door de beeldjes een beetje heen en
weer te bewegen totdat ze allemaal precies gelijk staan;
 Meer geavanceerde mogelijkheden zijn misschien het eruit gooien
van `slechte' beelden (wat dat ook moge zijn, bv. als er tijdelijk
een wolk of een voorbijganger voor het beeld staat of zo). Misschien
geraken we ooit zo ver dat we seeing (trillen en vervormen van het
beeld doordat de lucht van de dampkring zelf onstabiel is) kunnen
compenseren. Nog een andere interessante mogelijkheid is om
aan beeldherstelling te doen: als je de fouten van de optiek precies
genoeg kent, kan je het beeld (met al zijn fouten) terugrekenen
naar het ideale beeld.
Meer geavanceerde mogelijkheden zijn misschien het eruit gooien
van `slechte' beelden (wat dat ook moge zijn, bv. als er tijdelijk
een wolk of een voorbijganger voor het beeld staat of zo). Misschien
geraken we ooit zo ver dat we seeing (trillen en vervormen van het
beeld doordat de lucht van de dampkring zelf onstabiel is) kunnen
compenseren. Nog een andere interessante mogelijkheid is om
aan beeldherstelling te doen: als je de fouten van de optiek precies
genoeg kent, kan je het beeld (met al zijn fouten) terugrekenen
naar het ideale beeld.
 Natuurlijk kopen we geen kant-en-klare (dure) CCD-camera, maar
halen we ergens een goedkoop CCD chipje uit de elektronikawinkel
en doen daar dan ons ding mee. Een probleem is dat zo'n CCD
misschien nogal veel data genereert en dat de laptop die rap genoeg
moet kunnen binnenhalen (een klein CCD'tje heeft toch al gauw
512x512 pixels en die moeten allemaal door de parallelle poort).
Misschien kunnen we dit wat verhelpen door een processortje
(een microcontroller) aan de CCD te hangen die de beelden comprimeert
vóór ze naar de laptop verstuurd worden.
Natuurlijk kopen we geen kant-en-klare (dure) CCD-camera, maar
halen we ergens een goedkoop CCD chipje uit de elektronikawinkel
en doen daar dan ons ding mee. Een probleem is dat zo'n CCD
misschien nogal veel data genereert en dat de laptop die rap genoeg
moet kunnen binnenhalen (een klein CCD'tje heeft toch al gauw
512x512 pixels en die moeten allemaal door de parallelle poort).
Misschien kunnen we dit wat verhelpen door een processortje
(een microcontroller) aan de CCD te hangen die de beelden comprimeert
vóór ze naar de laptop verstuurd worden.
- Koeling voor de CCD: Naar het schijnt maakt een CCD ruis
op de beelden als hij te warm staat. Dus moeten we het ding koelen;
er zijn Peltier-elementen in de handel die het proberen waard zijn
(naar het schijnt is dat een ding dat aan de ene kant koud en aan
de andere kant warm wordt als je er stroom op zet).
Zie ook http://members.aol.com/atmlugt/beginner/which_telescope.htm.
Copyright © 2000, Geert Vernaeve.
[ Terug ]